Team flyby qualifies for A2RL Drone Race!
Read all about team flyby’s trials and tribulations at the qualification for the first A2RL Drone Race, which will be held in the Spring of 2025.

Picture: robo4you.at
We’re excited to announce that team flyby has qualified fo the first Abu Dhabi Autonomous Racing League (A2RL) drone race, which is set to take place in Abu Dhabi in the Spring of 2025! flyby is a team of students from the robotics club robo4you.at and TU Wien. At the A2RL races, small quadcopters navigate a course of racing gates as quickly as possible. Equipped with an RGB camera and a powerful onboard computer, the drones rely solely on the software developed by their teams to achieve optimal performance. Every team uses an identical drone - hardware modifications are prohibited – so the competition revolves entirely around creating optimal software. Team flyby had to overcome some tricky challenges over the course of the qualification, but they kept a level head and emerged victorious!
The Qualification: Laying the Foundation and Overcoming Unexpected Challenges
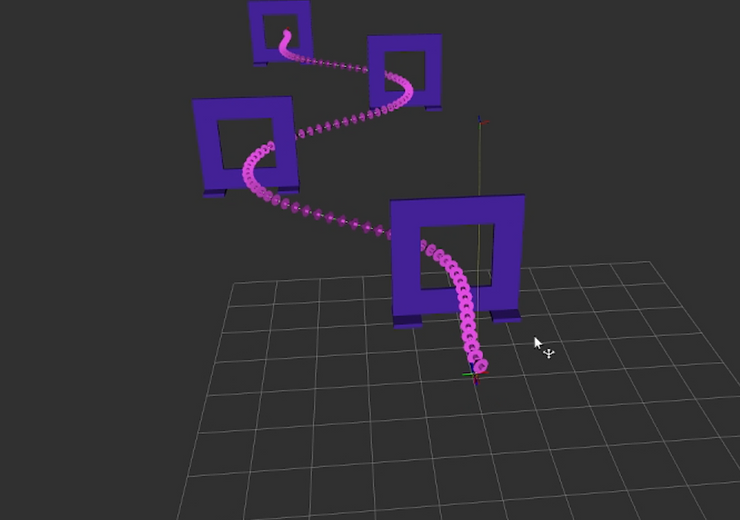
At the start of the qualification, team flyby received their drone, allowing them to start preparing for the qualification. Their initial focus was on achieving stable flight, and by the end of the first day, their drone could hover independently, and its onboard computer was successfully communicating with the flight controller to send commands. In the following days, the team worked on gate detection using a neural network, and they developed a software to autonomously plan and follow a path through the course. By the end of the first week, the drone was able to reliably fly through three gates of the preparation course without crashing. During the the second week of the qualification, the team faced a major setback though – the preparation course had a stone-paved floor with clear edges and varied textures, ideal for tracking features and estimating the drone’s position. The actual racecourse floor, however, was a pitch-black carpet with minimal features to track. This change disrupted the team’s position estimation algorithm. Despite this challenge, the team quickly improved their gate detection model and fused its positional estimates with those from the flight controller. After validating their solution in simulation, they tested it on the course, becoming the first team to successfully navigate all four gates on the new track.


Back to Smooth Flying
With the qualification round fast approaching, the team used their remaining time to enhance the stability and speed of their program. To improve position estimates, the gate detection model needed greater accuracy. This required preserving finer details, such as company logos on the gates, by reducing the downscaling of input images. However, the larger input size increased processing time, reducing the frequency of position updates and limiting the drone’s speed. To address this, team flyby implemented model quantization and optimized image preprocessing. These efforts reduced inference time by a factor of six, enabling smoother and faster autonomous flight. By the time qualification began, the team’s drone could follow its planned trajectory with precision. During the first qualification attempt, the drone completed the course successfully, accompanied by a note from the organizers describing the flight as “smooth.” With each subsequent run, the team slowly increased the flight speed. However, pushing the speed too far caused the drone’s controller to oscillate along the trajectory, bringing it dangerously close to the gates. After securing qualification, team flyby used the remaining slots to refine the trajectory and fine-tune the drone’s PID controller. These adjustments allowed the team to achieve better times and push their drone to its limits.
Out of approximately 17 teams from universities around the world, only seven managed to complete the course autonomously. Through relentless effort, averaging just four hours of sleep, the team successfully qualified for the A2RL race. The team continues working on new solutions to improve their performance.
If we’ve made you curious, stay tuned for more updates in Spring 2025 for the team’s first official drone race!
Team members
The team members who participated in the qualification are:
- Sebastian Kawicher (student @TU München)
- Bernhard Klauninger (student @TU München)
- Alexander Lampalzer (student @TU Wien)
- Joel Klimont (PhD student under Radu Grosu, head of the Research Unit Cyber-Physical Systems at TU Wien Informatics).
Curious about our other news? Subscribe to our news feed, calendar, or newsletter, or follow us on social media.